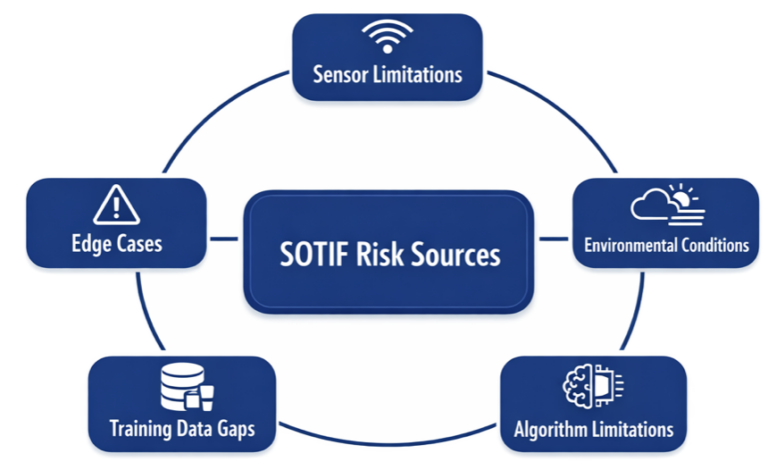
SOTIF Explained – Safety of the Intended Functionality (ISO 21448) Why SOTIF Matters in Modern Automotive Systems Modern vehicles increasingly rely on advanced driver assistance systems (ADAS) and autonomous functions.These systems use sensors, algorithms, and artificial intelligence to interpret their environment and make decisions.However, this introduces a new type of risk:What happens if the system works exactly as intended… but still makes the wrong decision?Traditional safety approaches focus on system failures.But in many modern systems, there is no failure.Instead, the system behaves correctly according to its design—but the design itself is insufficient.This is where ISO 21448 (SOTIF) becomes critical. What Is SOTIF? SOTIF stands for Safety of the Intended Functionality.It is defined in ISO 21448 and focuses on hazards that arise without system faults.This is a key distinction.In functional safety, risks are caused by malfunctions.In SOTIF, risks are caused by limitations of the intended functionality.Examples include:A camera system misinterpreting an objectA sensor failing to detect a pedestrianAn algorithm making an incorrect decisionIn all of these cases:The system works as designed—but the outcome is still unsafe. SOTIF vs ISO 26262 To fully understand SOTIF, it is important to compare it with ISO 26262.ISO 26262 focuses on functional safety.It addresses hazards caused by malfunctioning system behavior.SOTIF addresses hazards caused by performance limitations, not failures.Key difference:ISO 26262 → failure-based risksSOTIF → performance-based risksThese two domains complement each other.A complete safety concept requires both. Figure: Comparison between ISO 26262 (failure-based safety) and SOTIF (performance-based safety without faults) Typical SOTIF Scenarios (ADAS) SOTIF is particularly relevant for ADAS and autonomous driving systems.These systems rely heavily on perception and interpretation.Typical scenarios include:A camera misclassifies an object due to lighting conditionsA radar system cannot detect certain materialsA machine learning model makes an incorrect predictionEnvironmental conditions reduce sensor performanceThese are not failures in the traditional sense.They are limitations of the system. Figure: Example of an ADAS system misinterpreting an object due to sensor or perception limitations If you want to understand ISO 26262 and SOTIF in detail: Automotive Courses Sources of SOTIF Risks SOTIF risks can originate from different sources.One major source is sensor limitations.Sensors have physical constraints and cannot detect everything perfectly.Another source is algorithm limitations.Even well-designed algorithms can produce incorrect results in edge cases.Environmental conditions also play a role.Weather, lighting, and road conditions can affect system performance.Finally, insufficient system design can lead to incomplete coverage of real-world scenarios. Figure: Main sources of SOTIF risks including sensor limitations, algorithm behavior, and environmental influences How SOTIF Is Addressed SOTIF does not rely on traditional failure detection.Instead, it focuses on improving system performance and understanding its limitations.Typical approaches include:Extensive scenario-based testingSimulation of edge casesValidation using real-world dataImproving perception algorithmsDefining safe operational boundariesThe goal is to identify situations where the system may behave incorrectly and reduce the associated risks. Challenges in Practice Implementing SOTIF in real projects is challenging.One major difficulty is identifying all relevant scenarios.The real world is complex and unpredictable.Another challenge is validating system behavior.Unlike traditional systems, there is no clear “correct” or “incorrect” in many cases.Additionally, SOTIF requires a strong understanding of system limitations.This includes both technical and environmental factors. Common Misunderstandings There are several common misconceptions about SOTIF.One is the belief that SOTIF replaces functional safety.In reality, both are required.Another misunderstanding is assuming that SOTIF only applies to autonomous vehicles.In fact, it is relevant for many ADAS functions.A third mistake is treating SOTIF as purely a testing activity.SOTIF must be considered throughout the entire development process.Finally, some assume that eliminating failures is sufficient.SOTIF shows that even without failures, systems can still be unsafe. Summary SOTIF addresses a critical gap in modern automotive safety.Key takeaways:SOTIF focuses on risks without system faultsIt is defined in ISO 21448It complements ISO 26262It is especially relevant for ADAS and autonomous systemsUnderstanding system limitations is essentialSOTIF is a key concept for developing safe and reliable modern vehicles. If you prefer a visual explanation, this video explains SOTIF step by step: Explore Our Courses View Automotive Courses View Medical Device Courses View Aerospace/Aircraft Courses